Excellent Autonomous Pet Robot
 The Excellent Autonomous Pet (EAP) project focused on developing a robot capable of mapping and navigating its surroundings while recognizing expressions and following commands. The system utilized a combination of LiDAR, camera, Raspberry Pi, and Arduino electronics to enable autonomous movement and interaction. My primary role in the project was managing the mechanical design of the robot.
The Excellent Autonomous Pet (EAP) project focused on developing a robot capable of mapping and navigating its surroundings while recognizing expressions and following commands. The system utilized a combination of LiDAR, camera, Raspberry Pi, and Arduino electronics to enable autonomous movement and interaction. My primary role in the project was managing the mechanical design of the robot.
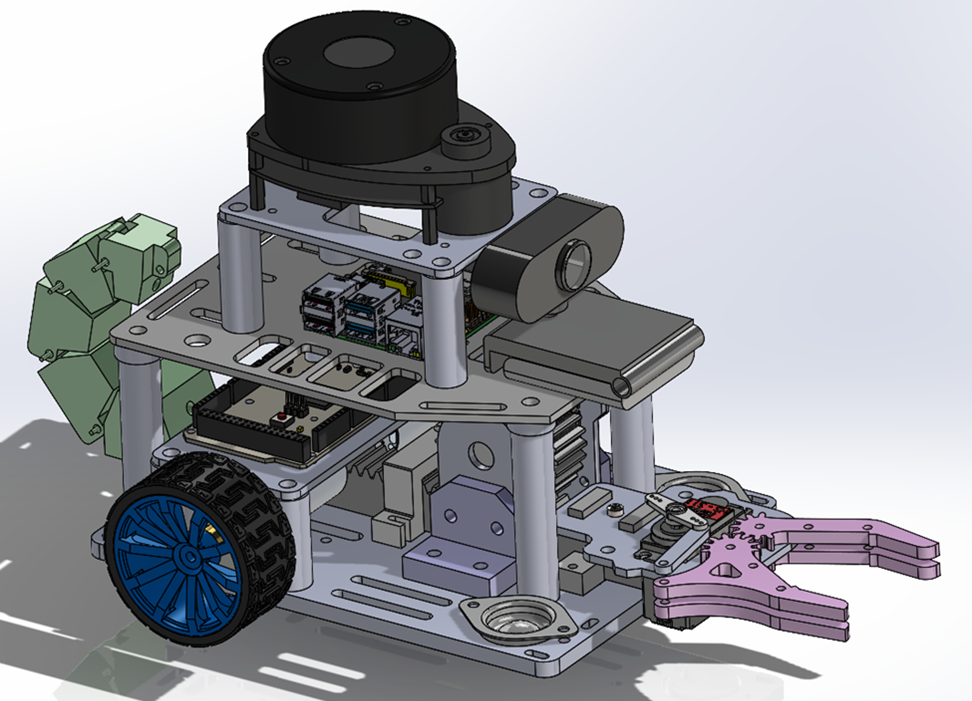
I designed the complete model using SolidWorks, incorporating various components like the robotic claw, rack and pinion, and a curling tail mechanism.

The robot’s body was constructed using laser-cut acrylic sheets for the chassis, while the functional components, such as the claw and tail mechanisms, were 3D printed using PLA material. This approach allowed for precise control over the robot’s object retrieval capabilities, which was a core function of the design.
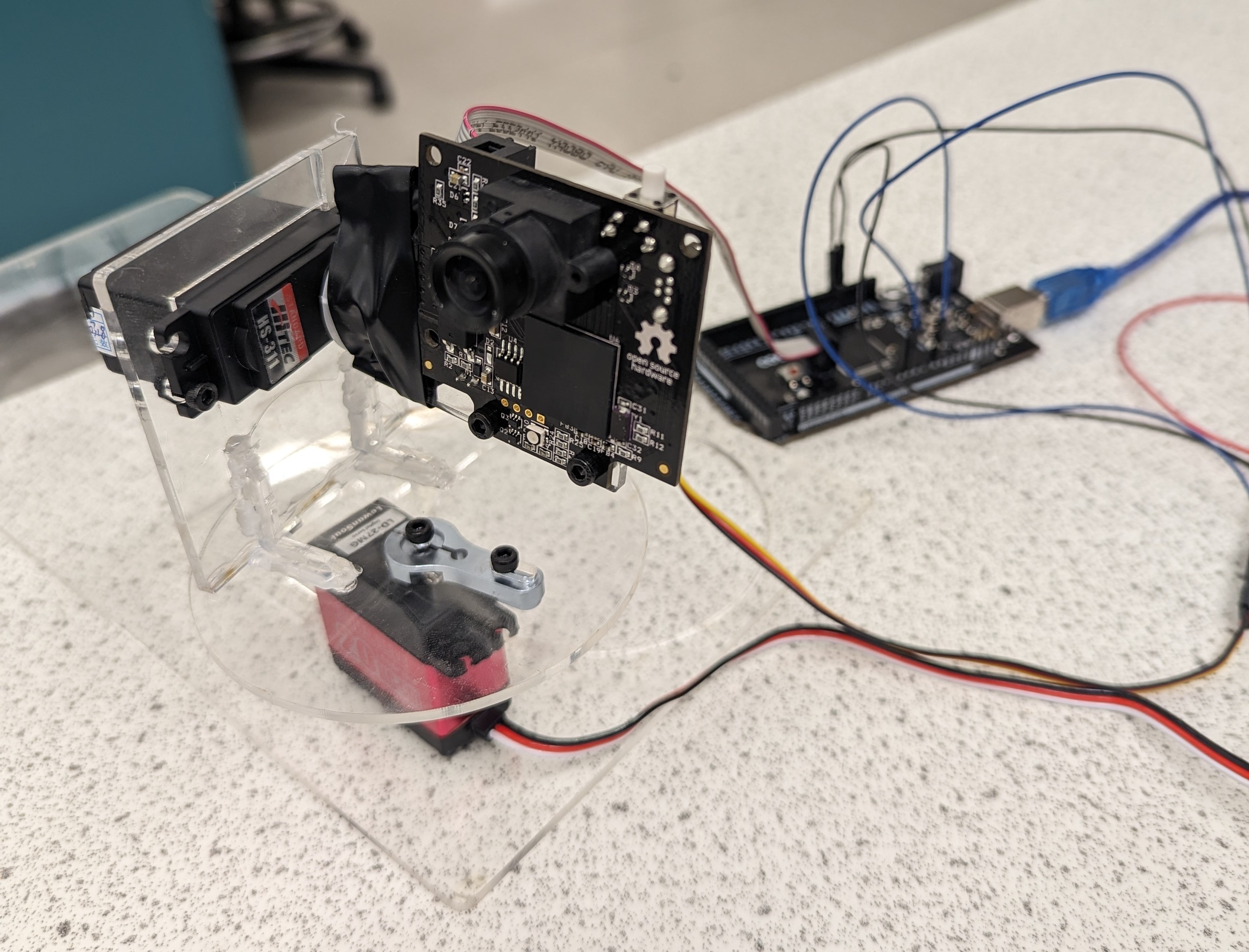
In addition to the mechanical aspects, I also developed the Arduino C++ code to control the claw mechanism using servo motors as seen in the below video. This allowed the robot to accurately grab and manipulate objects during its operation. My contributions ensured that the robot was both mechanically robust and capable of performing its intended tasks autonomously. Click HERE to see the detailed report.
The Tongue and Tail in Action
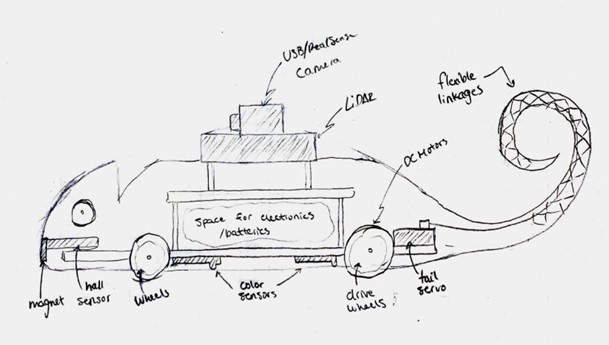
Initial Concept Sketch
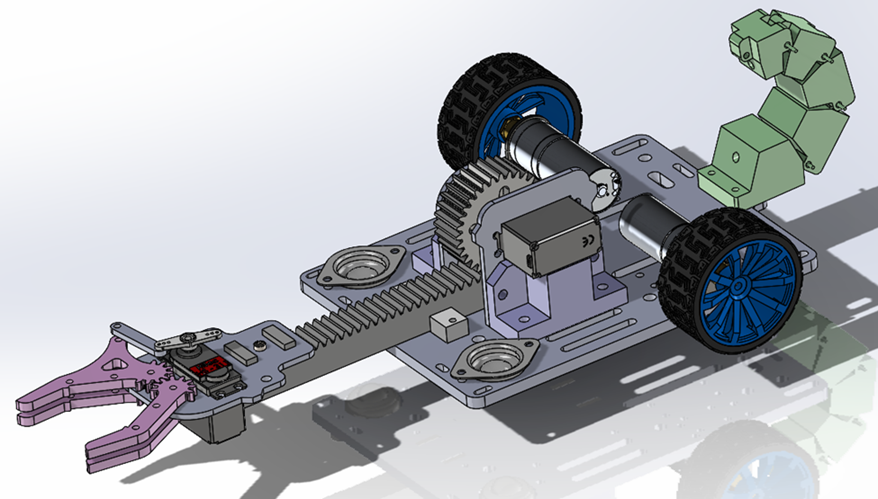
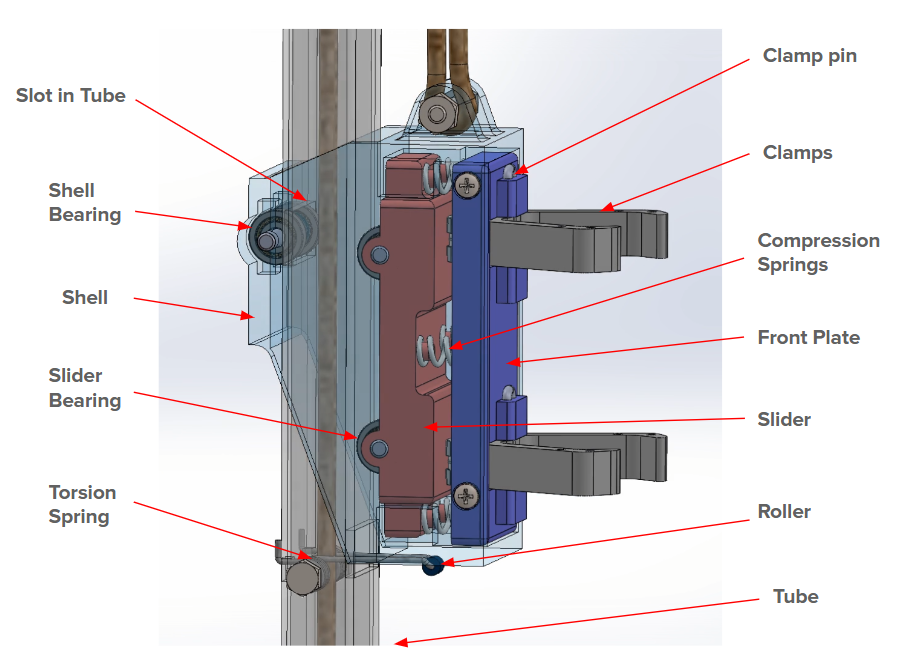
Lower Level Tongue and Tail Mechanism
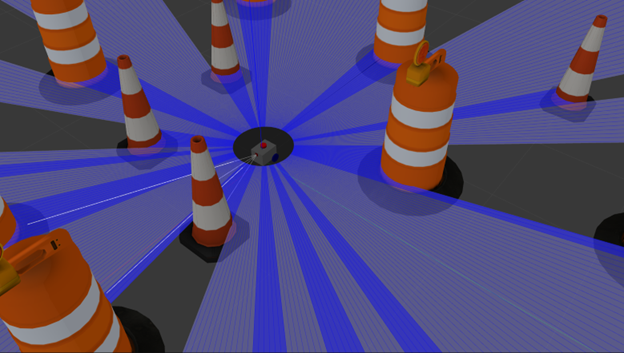
Visualization of Simulated LiDAR
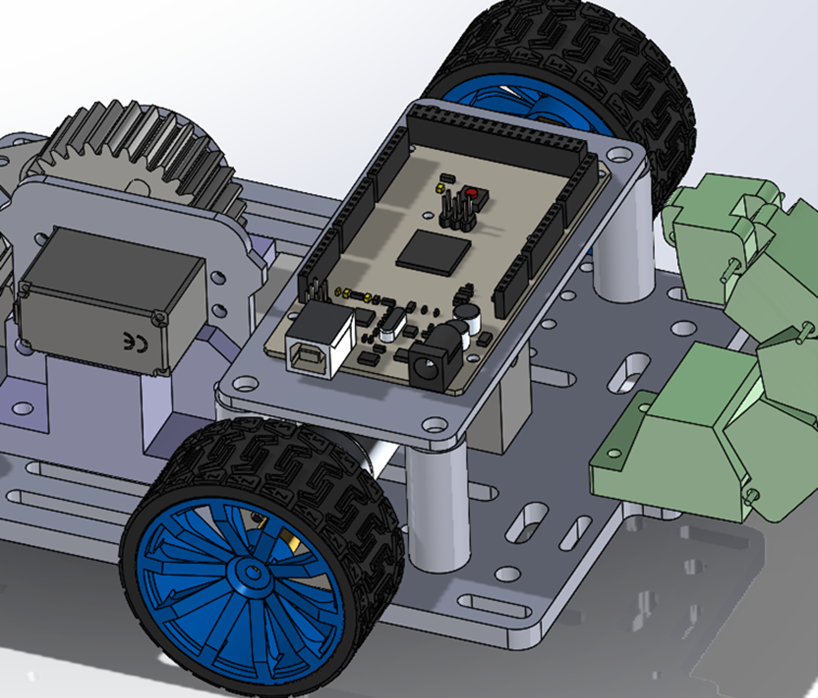
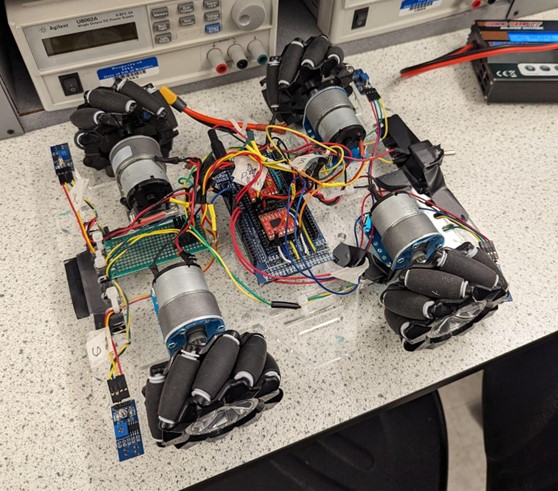
Intermediate Level Housing the Arduino
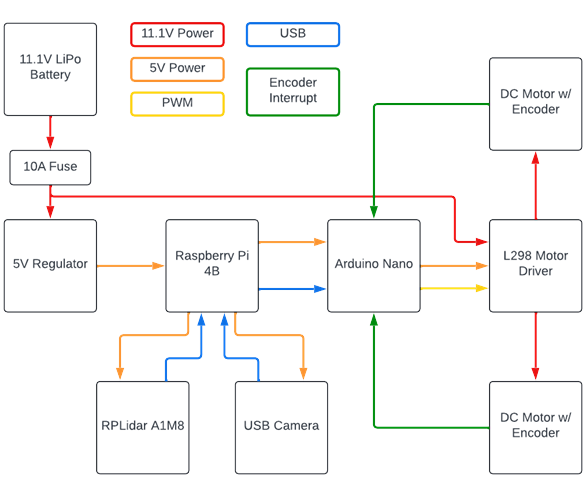
Simplified Electrical System Schematic
Top Skills Applied
SolidWorks
Laser Cutting
3D Printing
Arduino Coding
Explore My other projects
Autonomous Tank Robot
CU Boulder