Autonomous 'Tank' Robot
 For the Mechatronics course competition ‘Tanks’, we designed and built a fully autonomous robot equipped with a ball launcher and turret to compete in a head-to-head robotics challenge. Our objective was to create a system capable of navigating an arena, accurately targeting opponents, and shooting projectiles with precision.
For the Mechatronics course competition ‘Tanks’, we designed and built a fully autonomous robot equipped with a ball launcher and turret to compete in a head-to-head robotics challenge. Our objective was to create a system capable of navigating an arena, accurately targeting opponents, and shooting projectiles with precision.
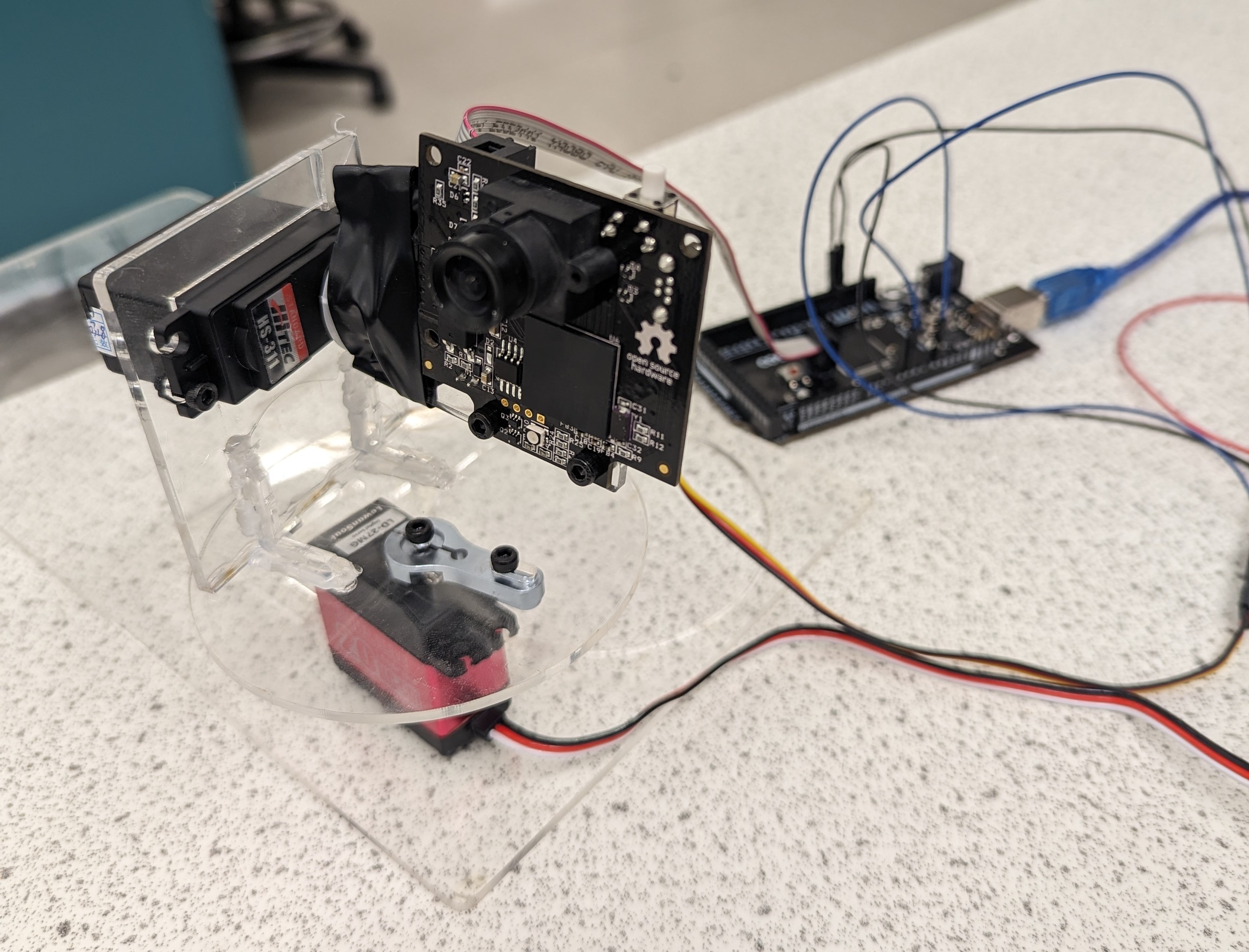
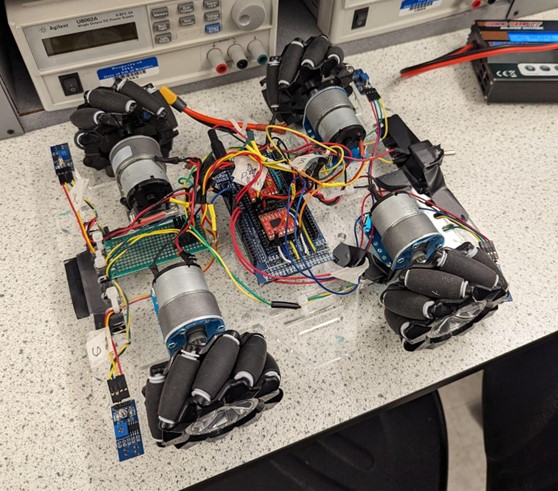
The final design featured a Mecanum wheel drivetrain, providing exceptional maneuverability, complemented by a Pixy camera for opponent detection. Our robot utilized a solenoid-actuated flywheel launcher and a servo-controlled turret, enabling it to track moving targets and autonomously reload through a force-activated ball silo.
I designed the drive level subsystems and was responsible for developing the C++ code that governed the robot's autonomous navigation and opponent detection. This involved using infrared sensors to follow the arena lines and employing the Pixy camera for identifying and tracking opponents. Additionally, I designed a mechanical ball silo that reloaded the launcher automatically when the robot approached after depleting its ammunition.
To implement the shooting mechanism, we combined a flywheel and solenoid system to ensure accurate projectile launches. By refining the design, we improved the power and timing of each shot, resulting in a consistent firing rate and efficient reloading—key factors that contributed to our robot securing a third-place finish. Click HERE to see the detailed report.
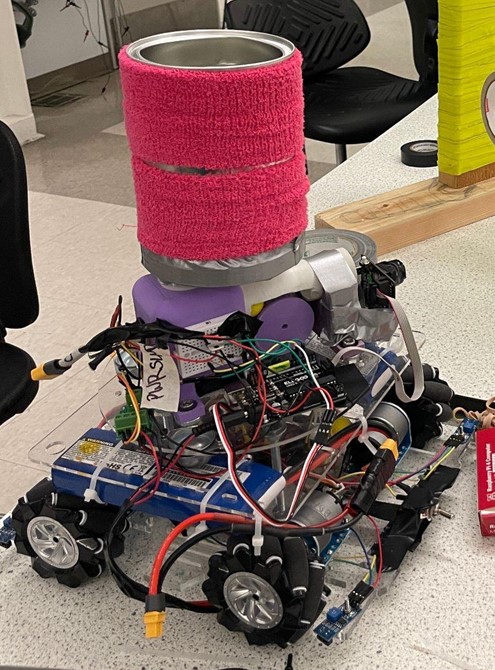
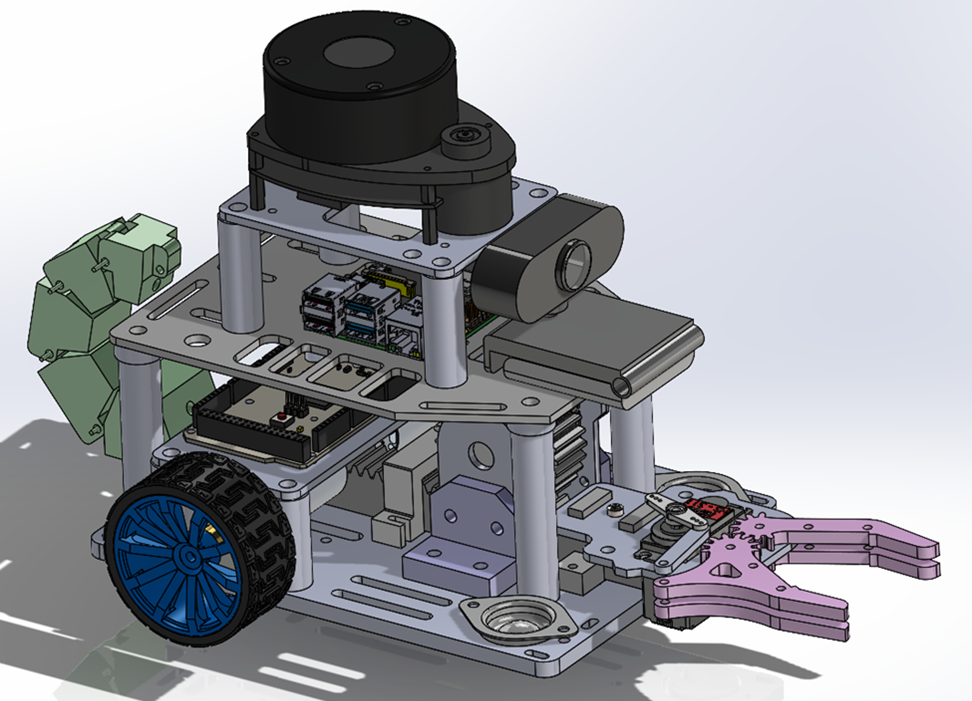
Our Tank 'PHANTOM ONE' Post Competition
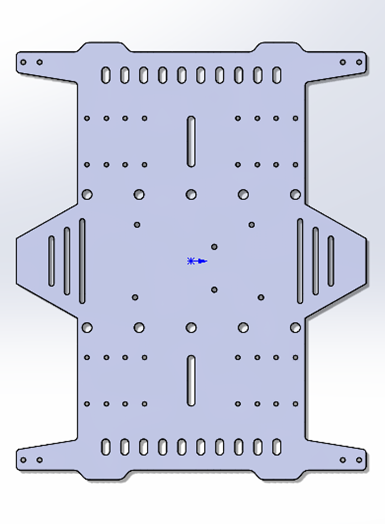
Drive Level Outline for Lasercutting
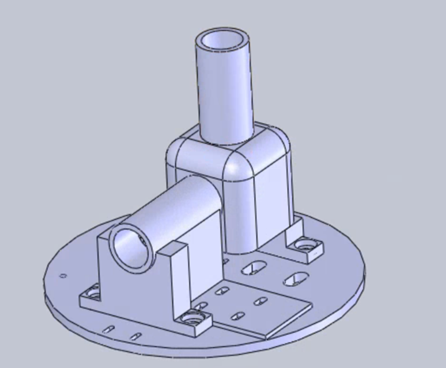
Ball Launcher Assembly
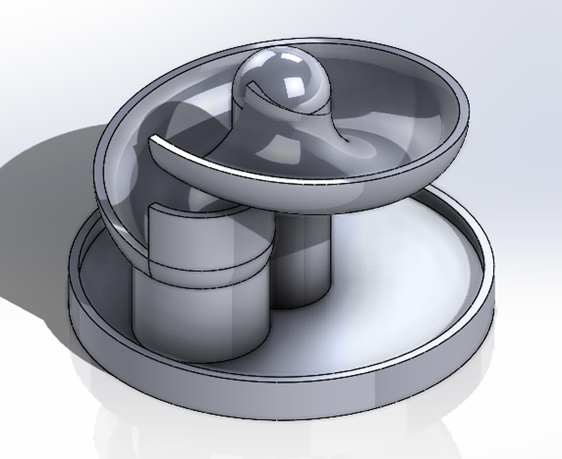
Spiral Feeder

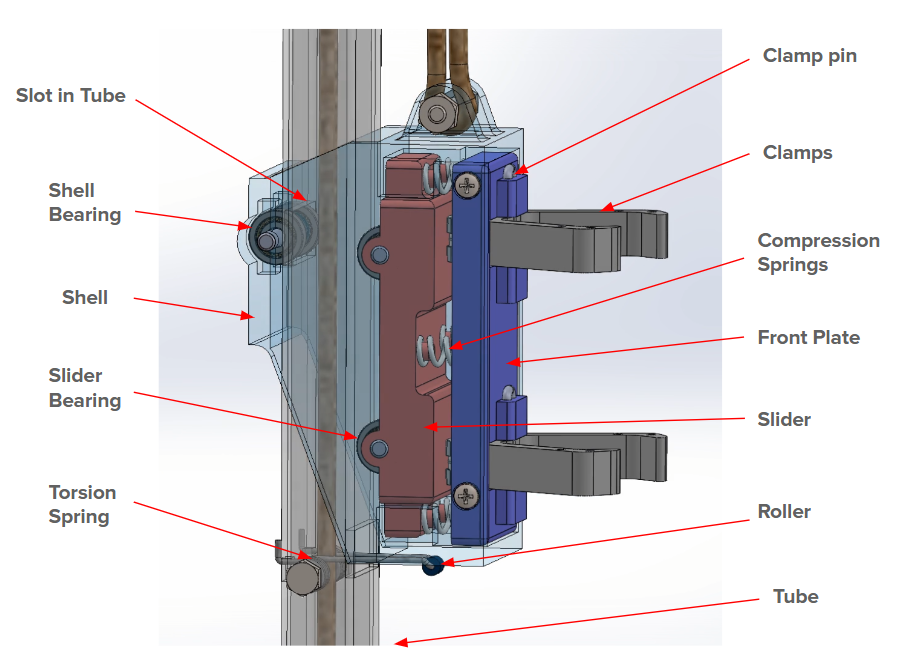
Lever Actuated Reloading Silo
Top Skills Applied
Laser Cutting
3D Printing
Arduino Coding
System Integration
My other projects
Excellent Autonomous Pet Robot
CU Boulder